Reconstruction
Fourier transform
- 1D FT: f^(w)=F(f)=∫−∞∞f(x)e−j2πωxdx
- 1D IFT: f(x)=F−1(f^)=∫−∞∞f^(ω)ej2πωxdω
- 2D FT: f^(u,v)=F(f)=∬−∞∞f(x,y)e−j2π(ux+vy)dxdy
- 2D IFT: f(x,y)=F−1(f^)=∬−∞∞f^(u,v)ej2π(ux+vy)dudv
Properties:
-
Linearity
F{af(x,y)+bg(x,y)}=aF(f)+bF(g)
-
Scaling
F{f(ax,by)}=∣ab∣1f^(au,bv)
F{f(x−a,y−b)}=e−j2π(au+bv)f^(u,v)
F(∂x∂f)F(∂y∂f)F(∂x∂y∂2f)F(∇2f)=j2πuf^(u,v)=j2πvf^(u,v)=−4π2uvf^(u,v)=−4π2(u2+v2)f^(u,v)
F(f(xcosθ−ysinθ,xsinθ+ycosθ))=f^(usinθ−vsinθ,usinθ+vcosθ)
Convolution
f∗g=g∗f
f∗(g∗h)=(f∗g)∗h
f∗(g+h)=f∗g+f∗h
- Differentiation (∂η is directional derivative along η )
∂η(f∗g)=∂ηf∗g=f∗∂ηg
Convolution Theorem
F{f∗g}(ξ)=f^(ξ)g^(ξ)
FT examples
2D Gaussian
Gσ(x,y)⟷Fe−2π2σ2(u2+v2)
Delta function
δ(u−a,v−b)⟷Fej2π(xa+yb)
Rectangular function
rect(x,y)={1,0,(x,y)∈[−21,21]×[−21,21] otherwise
rect(x,y)⟷Fsinc(πu)sinc(πv)sinc(x)=xsin(x)
Comb function
ΠIΔx,Δy(x,y)=m=−∞∑∞n=−∞∑∞δ(x−mΔx,y−nΔy)
ΠIΔx,Δy(x,y)⟷FΔxΔy1ΠIΔx1Δy1(u,v)

Enhancement
Filtering
Additive model
observed image f(x,y)=unstained image u(x,y)+noise n(x,y),(x,y)∈Ω
Method noise (D is the denoising operator)
f(x,y)−D{f}(x,y)
Ideal denoising operator D should have
f(x,y)−D{f}(x,y)∼N(⋅∣μ,σ)
An isotropic Gaussian filter
Gσ(x,y)=2πσ21e−2σ2x2+y2u(x,y)=Gσ(x,y)∗f(x,y)
Implementation (suppress the high frequency information)
u(x,y)=F−1{e−2π2σ2(ξ12+ξ22)f^(ξ1,ξ2)}
Scale Space
Heat Equation
Green’s Theorem
Outward Flux ∮∂ΩF⋅nds=∬ΩDivergence (∂x∂M+∂y∂N)dxdy
Heat flow is a vector field
V(x,y,t)=−c(x,y)∇u(x,y,t)
where ∇=(∂x∂,∂y∂),c(x,y) is the thermal conductivity.
Temperature change over Ωp
−∮∂ΩpV(x,y,t)⋅nds=−∬Ωpdiv(V(x,y,t))dxdy
Taking the limit of ∣Ωp∣→0, the rate of change becomes
∂t∂u(x,y,t)=div(c(x,y)∇u(x,y,t))
Isotropic Diffusion
Solve u(x,y,t) from a PDE
∂t∂u=∂x2∂2u+∂y2∂2uu(x,y,0)=f(x,y)
Frequence domain
u(x,y,t)→Fu^(ξ1,ξ2,t)∂t∂u^(ξ1,ξ2,t)=−4π2(ξ12+ξ22)u^(ξ1,ξ2,t) (differentiation property) u^(ξ1,ξ2,0)=f^(ξ1,ξ2).
Solution
u^(ξ1,ξ2,t)=u^(ξ1,ξ2,0)e−4π2(ξ12+ξ12)t
Equivalent to Gaussian smoothing
gτ(x,y)=4πτ1e−4τx2+y2,τ=2σ2u(x,y,τ)=gτ(x,y)∗f(x,y)u(x,y,0)=f(x,y)
Anisotropic Diffusion
ut=div(c(x,y,t)∇u)=cxux+cuxx+cyuy+cuyy=∇c⋅∇u+c∇2u
Choice of c(x,y,t)
c(x,y,t) or c(x,y,t)=e−(∥∇u∥/k)2=1+(k∥∇u∥)21.
Method noise
Taylor expansion trick
u(x,y,τ)=u(x,y,0)+τut(x,y,0)+O(τ2)
Hence,
f−D{f}=−τut(x,y,0)+O(τ2)
For different methods
f−GF{f}=−τ∇2f+O(τ2)f−AD{f}=−τdiv(c(x,y,0)∇f)+O(τ2)
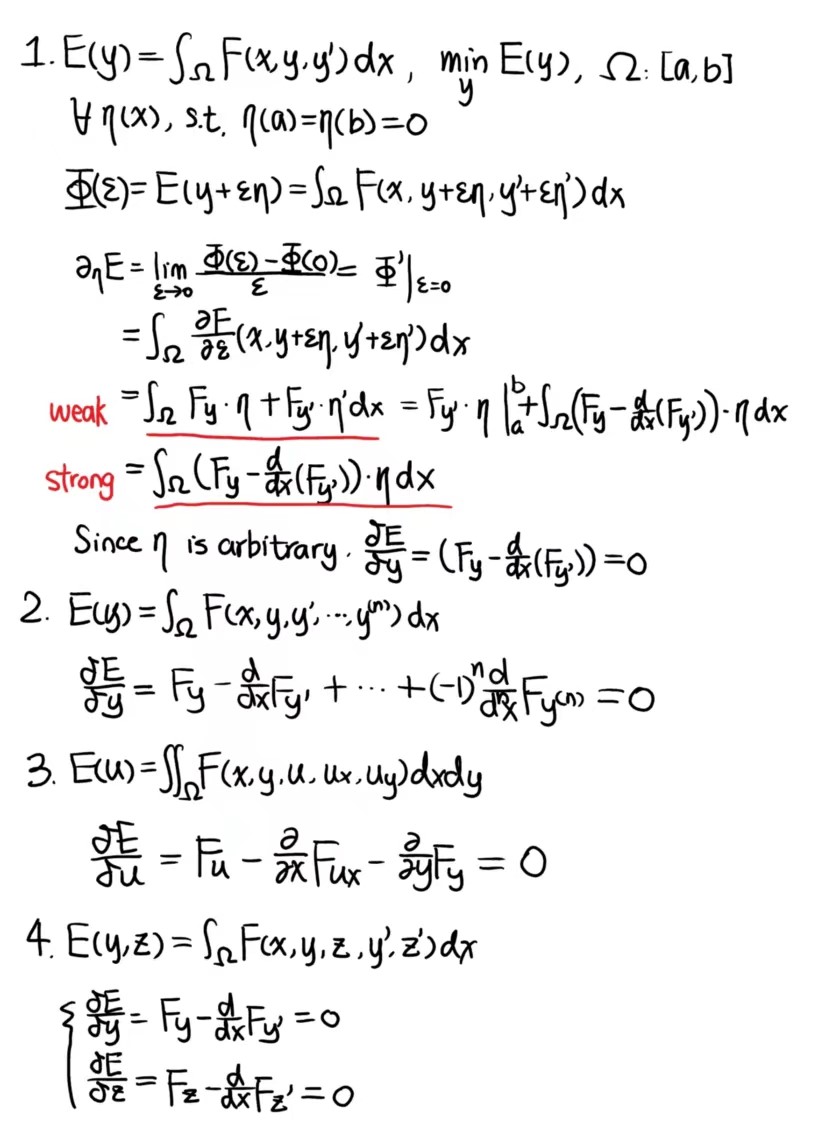
Calculus of variations
Total Variance Denoising
Energy function
umin∬Ωtotal variation ∥∇u∥+2λ(f−u)2dxdy.
E-L equation
δuδE=λ(u−f)−∂x∂⎝⎛ux2+uy2ux⎠⎞−∂y∂⎝⎛ux2+uy2uy⎠⎞=λ(u−f)−div(∥∇u∥∇u)
Method noise
f−TVD{f}=−λ1curv(TVD{f})
Solve PDE
Lecture notes (previous course)
Roadmap

Registration
General Formulation
E(ϕ)=d(I,J∘ϕ)+λL(ϕ)
Similarity metrics
- Sum of square distance
d(I,J)=x∈Ω∑(I(x)−J(x))2
-
Cross correlation
Cross correlation quantifies the linear relationship
cc(I,J)=E[(i−μi)2]21E[(j−μj)2]21E[(i−μi)(j−μj)]∝σIσJ⟨I−μI,J−μJ⟩ where {i=I(x),x∼u(Ωd)j=J(x),x∼u(Ωd)
- Mutual information
MI(I;J)=KL(P(i,j)∥P(i)P(j))=i∑j∑P(i,j)logP(i)P(j)P(i,j)=i∑j∑P(i,j)logP(i,j)−i∑P(i)logP(i)−j∑P(j)logP(j)=−H(I,J)+H(I)+H(J)
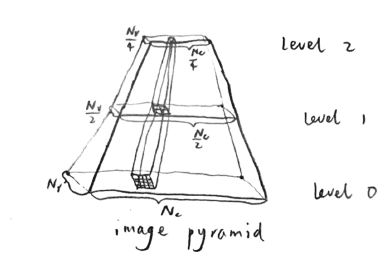
Multi-resolution search
Phase correlation
Input: I, J I^(u,v)=F(I(x,y))J^(u,v)=F(J(x,y))R(u,v)=∣∣I^(u,v)J^∗(u,v)∣∣I^(u,v)J^∗(u,v)r(x,y)=F−1(R(u,v))(τx,τy)=arg(x,y)∈Ωmaxr(x,y) Output tx,ty
Diffusion model
E(u)=∫Ω[I(x)−J(ϕ(x))]2+λ(∥∇u1∥2+∥∇u2∥2)dx
Demon
Optic flow v(x)=(v1(x),v2(x))
I(x1,x2,t)=I(x1+v1Δt,x2+v2Δt,t+Δt),(x1,x2)∈Ω=I(x1,x2,t)+v1Δt∂x1∂I(x1,x2,t)+v2Δt∂x2∂I(x1,x2,t)+Δt∂t∂I(x1,x2,t)+O(Δt2)
or
v⋅∇I=−It
Apply to registration
I(x1,x2)J(x1,x2)ϕ(x1,x2)(J∘ϕ)(x1,x2)=I(x1,x2,0),=I(x1,x2,Δt),=(x1+v1Δt,x2+v2Δt)=J(x1+v1Δt,x2+v2Δt)=I(x1+v1Δt,x2+v2Δt,Δt)=I(x1,x2,0)=I(x1,x2)
And
u(x)=v(x)⋅Δtu⋅∇I=I−J
Solve u(x)=∥∇I∥2I(x)−J(x)∇I(x) or practically
u(x)={0, if ∥∇I∥2+(I−J)2<ϵ∥∇∥2+(I−J)2I−J∇I, otherwise
Update ϕ:ϕ←ϕ∘(Id+u)
LDDMM
Too difficult